[VIP第1年] 指数:3
[VIP第1年] 指数:3
力控系统:开启机器人自动化新时代
在当今快速发展的工业环境中,力控系统正成为机器人技术的驱动力。与传统的位置控制相比,力控系统通过实时感知和调整接触力,提升了机器人在复杂任务中的表现。它不仅能够适应多变的环境和任务需求,还能在动态交互中保持高度的灵活性和安全性。这种先进的控制技术为机器人赋予了“触觉”,使其在精密装配、打磨、检测等任务中表现出色。提升效率与质量,降低生产成本,力控系统的优势在于其高精度和自适应能力。通过实时力位监测和自适应补偿技术,机器人能够在复杂曲面或不规则工件上实现恒定的接触力,从而提高打磨精度和产品质量。此外,力控系统还能有效减少因力位误差导致的质量问题,确保生产过程的稳定性和一致性。这种高效且精细的控制方式,不仅提升了生产效率,还降低了因返工或废品带来的成本。 达宽科技力控系统同步监测齿面接触力,实时优化装配角度,确保传动系统长期可靠运行。北京机器人柔性力控系统定制

在机器人熨烫座椅过程中,力传感器会实时检测机器人施加在熨斗上的力。根据反馈,力控系统可以自动调节机器人的运动轨迹,确保所施加的压力稳定在一个理想范围内。这样,不仅可以提高熨烫质量,保障熨烫效果的均匀性,还能减少面料受损的风险。
在进行机器人座椅熨烫作业前,须在示教器中预先设定一条自动化熨烫路径。操作开始时,机器人会将熨斗引导至座椅表面,缓慢靠近并施加初步的力,然后沿着预设轨迹在座椅上移动。在此过程中,达宽力控系统会依据实时反馈微调熨烫力度。例如,座椅的某些区域可能因褶皱或其他因素导致表面存在误差。利用达宽力控系统的自适应补偿技术,能够自动调整机器人施加的力度,以适应微小的偏差和不规则性。 江苏力控系统使用方法达宽科技力控系统构建全流程数据追溯,线束装配质控效率提升,数字化管理全方面升级。

我们将以ABB工业机器人为例,介绍如何基于达宽平台级力控大脑装配服务器的多种线束。首先,使用工具坐标系精确示教多个线束接口和多个服务器接口的对应初始位置。我们注意到,该服务器有多种规格的接口,我们演示了HDMI、USB、电源和网线的装配,这四种线束是不同的接口,线束粗细也不同。使用工装夹持线束接口,分别到达指定点位。面对这种装配过程中的微小偏差和不规则性,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术利用六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少力,从而让接口能够准确对接。
力控系统:开启机器人应用新时代
在机器人技术飞速发展的当下,力控系统正成为众多企业实现高效生产与创新应用的关键。达宽科技凭借深厚的技术积累,打造出的力控系统,为机器人相关任务带来了性的提升。达宽力控系统就如同机器人的“智慧触觉”,能通过力传感器精细感知并调节力度。以往机器人在执行任务时,常因力度把控不当,导致产品质量参差不齐。而力控系统可实现精细的力度控制,确保每一个动作都恰到好处,极大提高了产品一致性。 达宽科技力控系统应对PCBA线束精密装配需求,稳定控制插接力度,保障电子元件安全性与装配一致性。

在2024年,达宽科技研发的机器人力控系统作为一个平台级的“力控大脑”,提供了稳定可靠、功能、界面友好统一的方案,已经在汽车制造、3C电子产品、服务器制造以及机械零部件生产等多个行业领域取得了的成就。这一系统不仅成功落地多家行业的企业,而且极大地推动了这些企业生产流程的自动化、智能化和数字化转型。本文集中展示了达宽科技在2024年的部分案例。展望2025年,我们有充分理由相信,随着柔性力控系统的不断完善,其降低了力控技术的门槛,机器人力控技术将在生产制造、服务、科研等多个领域实现更深入的渗透,为行业发展带来更多价值。力控系统支持柔性化生产布局,达宽科技方案无缝衔接多车型线束装配任务,加速产线智能化升级。江苏达宽科技力控系统方案
力控系统智能预判插接异常状态,达宽科技技术提前规避PCBA模块潜在功能失效风险。北京机器人柔性力控系统定制
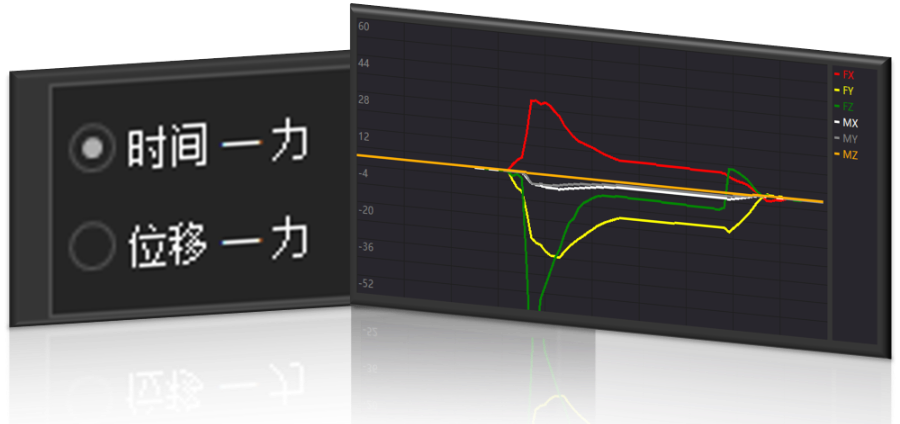
由于线束种类不同,接口不同,受力面的面数不同,所以每个种类的线束需要的力控参数是不一样的,我们需要对每一类线束进行单独设置。这样,在接口装配过程中,达宽力控系统通过调整机器人的位置和姿态,还能更有效地减少由外力的干扰。在提供的GIF动画中,我们可以观察到达宽力控系统界面中,六维力曲线的实时变化,除了FX方向外,其他方向的力被有效抵消。
为了避免因力过大导致接口损坏,就得让机器人施加的力在安全阈值内。因此,我们可以引入力超限报警机制。考虑到不同线束接口的工艺差异,达宽科技的柔性力控系统设计了灵活的报警功能,允许在每个监测方向上设置两级报警阈值,以提高报警功能的适应性。同时,我们设置了装配时间超时报警,防止机器人装配失败且力还在安全阈值内时,时间过长的问题。我们还设置了超限自动退出功能。一旦监测到力超出预设的安全值或时间超时,系统将发出警报并自动停止装配流程,从而保护接口,并提醒相关工作人员。 北京机器人柔性力控系统定制
文章来源地址: http://smdn.yybyjgsb.chanpin818.com/ruanjian/rjkfgs/deta_27380602.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。